O controle PID é muito utilizado nas engenharias para o controle de processos industriais. Sua popularidade se deve à simplicidade de implementação, eficiência e versatilidade para controlar uma ampla variedade de processos industriais, como temperatura, pressão, nível, vazão, velocidade e posição. Neste post, iremos trazer o conceito do controle PID (controlador proporcional integral derivativo), de forma simplificada.
Objetivo
É uma técnica de controle de processos, fazendo que o erro (perturbações) seja minimizado e corrigido automaticamente. O controle PID tem como objetivo manter uma variável de processo o mais próxima possível de um valor desejado, chamado de setpoint.
Como é feito?
O erro é minimizado pela ação proporcional, zerado pela ação integral e obtida uma velocidade antecipada pela ação derivativa. Para que tudo isso funcione de forma correta, são feitos vários cálculos matemáticos ao nível de engenharia, que não convém entrarmos em detalhes.
O que preciso saber?
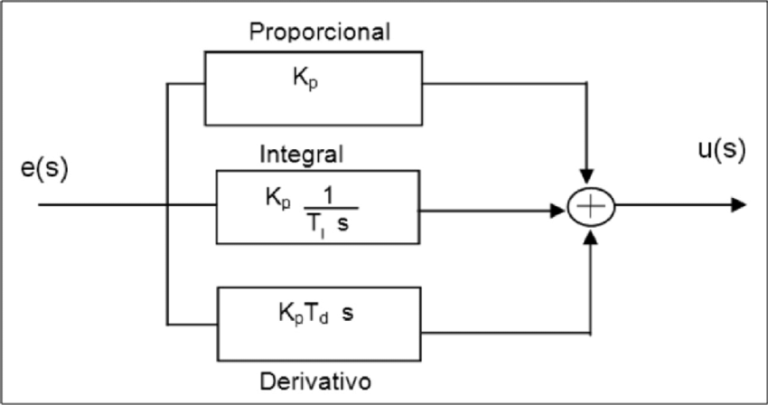
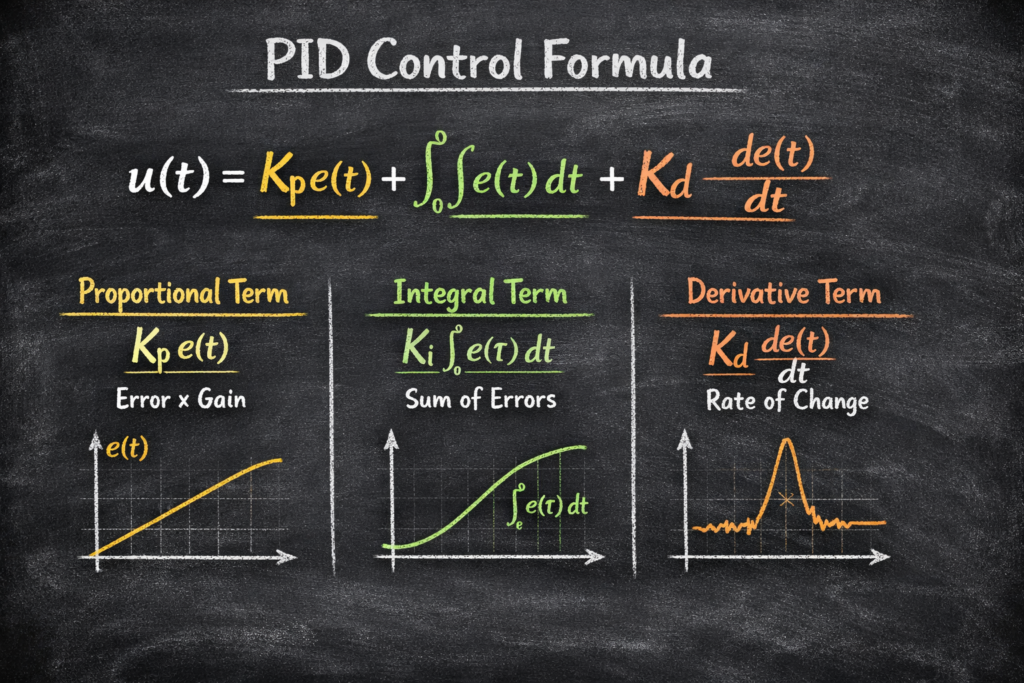
Existem 3 valores (P) = Kp , (I) = Ki e (D) = Kd, esses 3 valores são utilizados em fórmulas matemáticas.
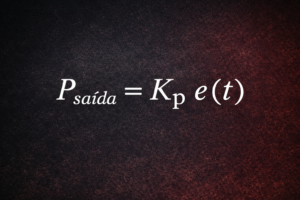
P > Comparado com a ação liga-desliga, produz um sinal de saída que é proporcional à amplitude do erro e(t).
Um ganho proporcional muito alto gera um alto sinal de saída, o que pode desestabilizar o sistema. Porém, se o ganho proporcional é muito baixo, o sistema falha em aplicar a ação necessária para corrigir os distúrbios do sistema.
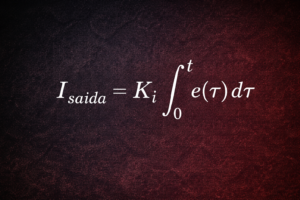
I > Ação integral produz um sinal de saída que é proporcional à magnitude e à duração do erro.
Possibilitando corrigir o erro gerado pela ação proporcional (P) e acelera a resposta do sistema.
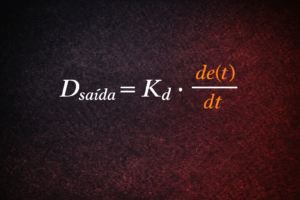
D > A ação derivativa reage à taxa de variação do erro, ou seja, à velocidade com que o erro está mudando. Gera um sinal de saída proporcional à taxa de variação do erro ao longo do tempo. Sua função principal é prever o comportamento futuro do sistema.
Obs.: A ação derivativa não deve ser utilizada em processos nos quais o sistema deve responder rapidamente a uma perturbação, nem em processos que apresentem muito ruído no sinal medido, pois levaria o processo à instabilidade. Na prática, em muitos processos, o (I) é zerado.
Entenda PID na prática
Temos uma resistência ligada ao controlador de temperatura, onde o objetivo do controlador é aquecer a resistência até a temperatura programada pelo operador (Set-point). Para obter a máxima eficiência, é utilizado o controle PID, onde o Set-point é alcançado em um menor tempo possível.
É importante que a temperatura fique estável após atingir o Set-point, mesmo havendo desvios no processo (erro), como jatos de ar, troca de calor com outro material, mudança no valor do Set-point. Toda essa estabilidade e eficiência é graças ao controle PID que reconhece (sensor de temperatura) os desvios de processo e logo corrige o controle na saída.
Conheça os protocolos de redes mais utilizados na indústria
Como obter os valores de PID?
Na literatura, são encontrados diferentes métodos de sintonia de controladores PID, sendo cada método indicado para um tipo de sistema. Os métodos de sintonia mais utilizados na prática são:
• Método de Ziegler – Nichol sem Malha Aberta. • Método de Ziegler – Nichol sem Malha Fechada. • Sintonia por Resposta em Frequência. • Sintonia pelo Lugar das Raízes.
RESUMIDAMENTE, são métodos matemáticos onde é aplicado um sinal de entrada “degrau”, onde o tempo é cronometrado até a aplicação (saída) atingir a estabilidade. A variação da saída cria um desenho gráfico, onde é possível retirar valores para iniciar os cálculos matemáticos de engenharia (integral / derivada / limite).
Estes métodos matemáticos geralmente são realizado pelos fabricantes no desenvolvimento do equipamento. Quando é perdem os valores do PID ou há mudanças físicas na aplicação, utilizamos o método de auto tuning para se obter um novo valor do PID.
Como realizar o Auto tuning?
Voltando ao nosso exemplo do controlador de temperatura:
Ao ativar a função auto tuning no controlador, é desconsiderado o set-point temporariamente. Pois o controlador estará ligando e desligando a resistência por varias e varias vezes (testagem por repetição).
Sendo assim, a temperatura irá abaixar e aumentar, afim de reconhecer a função:
Entrada (temperatura) = Saída (potência elétrica) x tempo.
Os valores do PID são definidos automaticamente no final do auto tuning e o controlador voltará a respeitar o Set-point.
Conclusão
Como visto neste post, o assunto do controle PID não é simples e deve ser observado com atenção.
Concluímos que, quando o controle de processo é simples, não envolvendo muitas variáveis o auto tunning é suficiente. Mas quando se fala de processos complexos ou havendo mudanças físicas no equipamento, a melhor opção é entrar em contato com o fabricante ou realizar todo calculo matemático.
O controle PID é uma das bases da automação industrial moderna. Seu funcionamento, baseado nas ações proporcional, integral e derivativa, permite controlar processos de forma eficiente, estável e precisa. Apesar de sua simplicidade conceitual. Quando bem dimensionado e sintonizado, ele oferece excelente desempenho e continua sendo uma das ferramentas mais importantes para profissionais de automação industrial.
Inicie sua carreira profissional
Fundamentos que preparam para o mercado.
Comece do zero com uma base sólida e prática.
Entenda os princípios, a lógica e os equipamentos que regem a automação industrial e dê o primeiro passo para uma carreira em alta.
Aprofunde-se em tecnologias avançadas, otimize processos e adquira o conhecimento de ponta que empresas líderes buscam. Suba de nível na sua carreira atual ou prepare-se para a próxima oportunidade.
Todas as informações obtidas neste site e páginas de redes sociais relacionadas a ele são apenas de caráter INFORMATIVO. A Automação Expert NÃO se responsabiliza por nenhum dano ou prejuízo causado pela execução de ações relacionadas ou não ao conteúdo descrito aqui. Procure sempre um profissional qualificado, siga as normas e utilize os equipamentos de proteção para qualquer trabalho que envolva eletricidade.
Usamos cookies em nosso site para oferecer a você a experiência mais relevante. Você pode descobrir quais cookies estamos usando ou desativa-los
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. These cookies ensure basic functionalities and security features of the website, anonymously.
Cookie
Duração
Descrição
cookielawinfo-checkbox-analytics
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Analytics".
cookielawinfo-checkbox-functional
11 months
The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category "Functional".
cookielawinfo-checkbox-necessary
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category "Necessary".
cookielawinfo-checkbox-others
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Other.
cookielawinfo-checkbox-performance
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Performance".
viewed_cookie_policy
11 months
The cookie is set by the GDPR Cookie Consent plugin and is used to store whether or not user has consented to the use of cookies. It does not store any personal data.
Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features.
Performance cookies are used to understand and analyze the key performance indexes of the website which helps in delivering a better user experience for the visitors.
Analytical cookies are used to understand how visitors interact with the website. These cookies help provide information on metrics the number of visitors, bounce rate, traffic source, etc.
Advertisement cookies are used to provide visitors with relevant ads and marketing campaigns. These cookies track visitors across websites and collect information to provide customized ads.